リケラボは研究者、研究開発・技術職など理系の知識を生かしてはたらきたい人を応援する情報サイトです。

“指先で考えるロボットハンド”で生産現場にパラダイムシフトを。近接覚センサを武器に「人間を超えるロボット」実現に挑む
大阪大学基礎工学研究科助教/株式会社Thinker取締役 小山佳祐
人手不足に悩まされる製造現場では、自動化が重要課題となっています。そこで注目を集めているのが産業用ロボットや協働ロボットです。たとえば自動車の製造ラインでは、これまで人に委ねられていた作業をロボットが代行しています。そんなロボットは基本的に、人の動きを真似るよう開発されています。
ロボットを動かす際に重要なのが、対象となるモノの認識です。人が対象を目で見て手で触って確かめるように、ロボットにも視覚と触覚を与えたい。けれども、それにはどうしても限界がある。それならまったく発想を変えたロボットを創ればよいのではないか。そう考えた大阪大学基礎工学研究科の小山佳祐助教は、視覚でも触覚でもない「近接覚」センサを開発。取締役を務めるベンチャー企業・株式会社Thinkerの近接覚センサ搭載ロボットハンドプロジェクトは、NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)の「ディープテック・スタートアップ支援事業」に採用され、省人化を実現する新型ロボット「Thinker Model A」が発売されるなど実用化も進められています。
人と産業用ロボットの決定的な違い
── そもそも産業用ロボットは、どのような機能を備えているのでしょうか。
小山:最初に開発された産業用ロボットは、人の代わりに重いものを運んだり、溶接をするようなマシンでした。何らかの作業をするためには、対象となるものについての正確な位置決めが求められます。この位置決めについて、人がモノを掴んで持つときとロボットでは決定的な違いがあります。人ならモノに触れつつ力をコントロールしながら掴んで持てます。けれどもロボットは、人のように対象に応じて力をコントロールしたりはできません。だから可能な限り正確に位置を決めて、ロボットアームなどを対象にぶつけないようにしてモノを掴まなければならないのです。
── 人はまずモノにそっと触れて確かめ、それからぐっと力を入れて持てる。けれどもロボットを動かす力は加減をできないわけですね。
小山:そのとおりで力加減の難しさが、ロボットの難点です。私は以前、高専ロボコンをやっていました。このとき作っていたのが、縦横高さそれぞれ1mぐらいの大きさで、重さ10キロほどのロボットです。このサイズのロボット同士がぶつかったりすると、簡単に壊れてしまう。だからロボットをモノにぶつけちゃダメだと肝に銘じています。ぶつけないためには画像センサや触覚センサを活用するのですが、画像センサではカメラを設置する場所により、どうしても死角ができます。一方、触覚センサは対象物に接するまでは、何も反応しません。だから人の手のようにフレキシブルな動きに近づけたいけれども、ロボットでそれを実現するのは難しいのです。
── 従来の画像センサ、触覚センサでは解消できない問題があるということですね。
小山:そこで見つけたのが電気通信大学の下条誠先生の研究室です。下条先生は画期的なセンサ、近接覚センサの研究者です。下条先生の研究室で学び、さらに自分なりに近接覚センサを追究していった結果、落ちてくる風船を掴めたり、割れやすい試験管、それも動いている状態のものをそっと掴めたりするロボットアームを開発してきました。
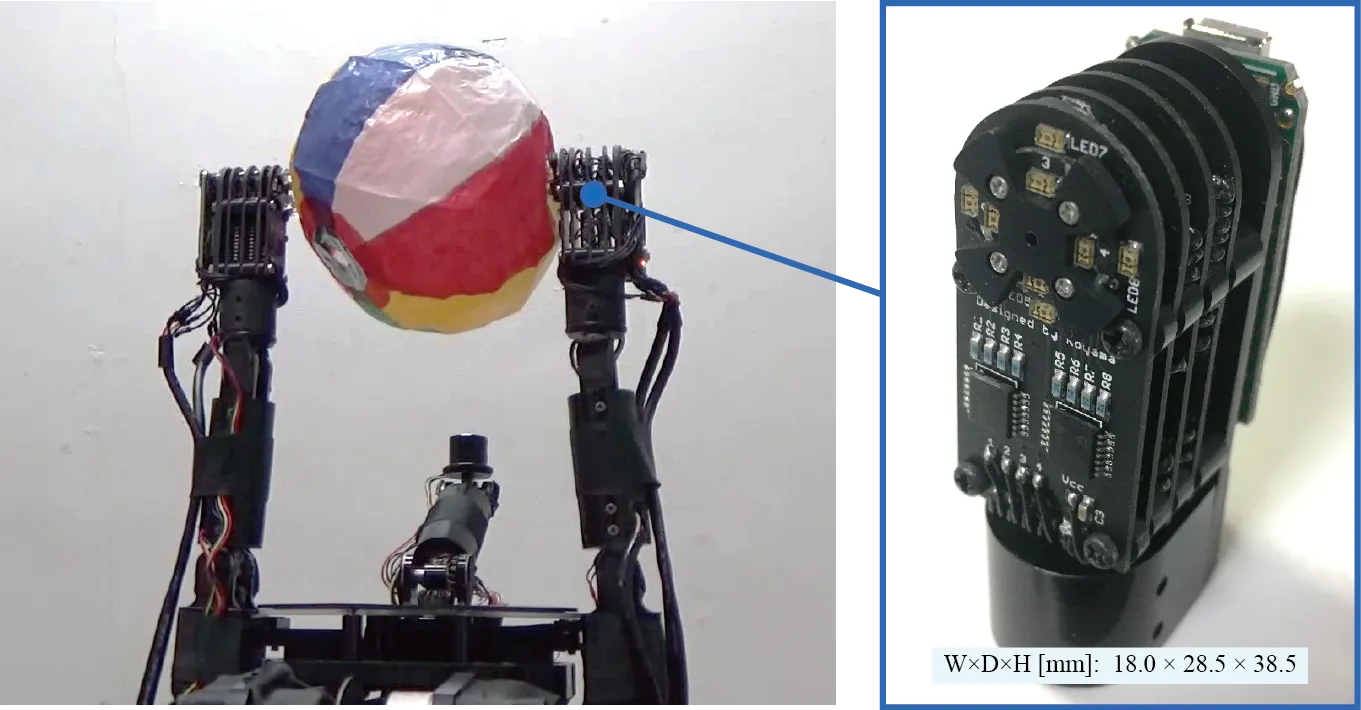
落ちてきた紙風船の位置を近接覚センサで正確に把握しながら、そっと掴むロボットアーム。
出典:https://kk-hs-sa.website/research/index-j.html
近接覚+機械学習で実現した人間を超える感覚
── 近接覚センサとは、どのようなセンサなのでしょうか。
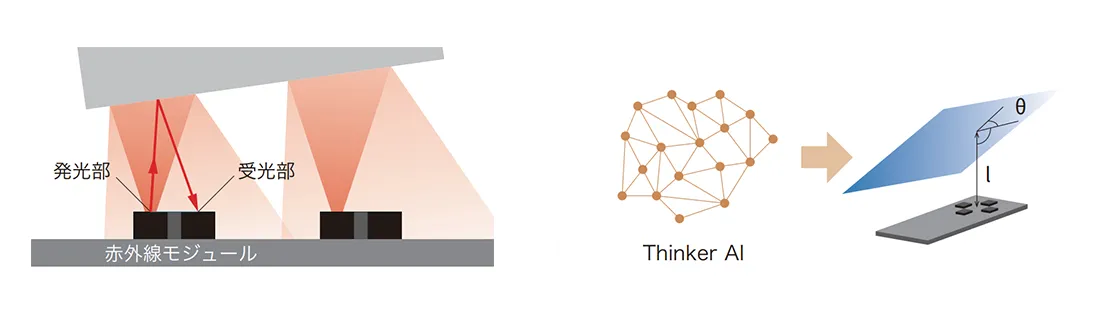
小山:赤外線を対象に当てて、対象からの反射をセンシングしてその位置を計測する、これが近接覚センサの原理です。光しか使わないので対象と接触しません。ロボットアームにカメラなどをつけて、画像センサを使うときに生じるような死角ができたりもしません。また触覚センサのように対象に触れてデータ取得するシステムでもなく、離れた位置からでも対象を認識できます。
── 光の反射を利用するのであれば、対象による反射の変化によって問題が生じるのでは?
小山:たしかに、以前の近接覚センサは対象を選ぶセンサでした。対象の色が白ければ光を多く反射しますし、黒ければ反射が少なくなってしまう。反射光により測定精度が左右されるのが、近接覚センサ特有の問題点でした。けれども機械学習を組み合わせれば、課題を解消できるのではないかと考えて研究を進めてきました。おかげで今では計測可能な対象物が大きく広がり、どのようなものでも正確に認識できるようになっています。
── 近接覚センサと機械学習を組み合わせるのですか。
小山:そうです。実は近接覚センサに関する機械学習の研究者は、ほとんどいません。だから近接覚センサ専用のAIなどもまったく開発されていない。誰もやっていないのなら、それこそ研究する価値があるじゃないかと思って取り組んだのです。とはいえ、どのようなデータを学習させれば良いモデルを構築できるのかなど、研究を始めた当初、2019年ごろにはまだまったくわかっていませんでした。一方で機械学習そのものの研究は世界中で進められていて、とても進歩が速い。その成果を組み込みながら研究を進めたおかげで、2020年にはさまざまな対象について、ほぼ正確に距離や位置を測定できるようになりました。
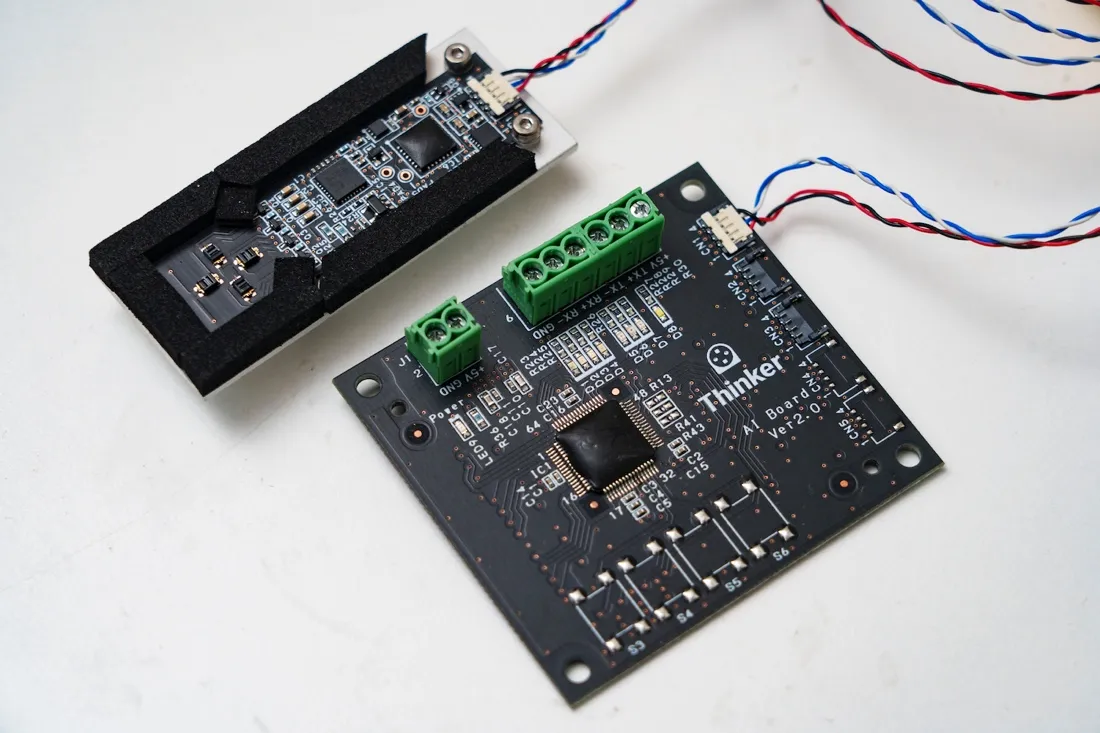
近接覚センサとAI基板。左側の先端部分に4つの赤外線モジュールが配置されている。受光データがAI基板に送られて、対象との距離や角度が計算される。
写真撮影:リケラボ編集部
── 機械学習させるとは、つまり大量のデータを読み込ませるわけですね。
小山:そのために研究室でひたすらデータを集めました。とにかく一定量のデータがなければ、研究を進められません。毎日朝の9時から夜の12時まで研究室にこもって、ひたすら計測データを読み込ませていました。単純作業といえばその通りだし、作業そのものは面白くもないけれど、その結果として研究が進むのであればやりがいも出てきます。目標を達成するために必要な作業については、とにかく誰かがやらないと研究が進みませんから。ただ正確にデータを取るために細心の注意を払いました。たとえば温度を一定に保つために、エアコンのスイッチを入れてから1時間待って、それから計測するといったやり方です。データ収集時の温度が、ほんの少し変わっただけでもデータに影響が出ますから。
写真撮影:リケラボ編集部
生産現場にパラダイムシフトを起こす
── 対象の色を選ばず判断できるようになり、近接覚センサの実用化が見えてきたのではありませんか。
小山:社会実装は、研究を進める際の前提として考えていました。ただ近接覚センサの対象に触れずに判断するやり方は、人間の動きとは異なるので、社会実装するのは簡単ではありません。現状のロボットは人間をモデルに考えられている、だから超えられない限界がある。元々ロボットが使われる製造現場そのものが、人が作業する前提で考えられてきたものです。そこで人を置き換える存在としてロボットを導入するのであれば、どうしても人をモデルとして考えるようになります。
── だとすれば、視覚や触覚など人の感覚とは異なる、近接覚を利用するロボットは、人を前提としない生産現場でこそ真価を発揮できる?
小山:そのための研究を進めています。工学系の研究では産業応用の視点は必須ですから、実用化に向けた研究や企業との共同研究にも取り組んできたのですが、残念ながらこれまでのところはうまく進みませんでした。その理由こそが、まさに近接覚センサの先進性なのですが、要するに企業からすれば近接覚センサを搭載したロボットは、これまで存在していない。だから、近接覚センサ・ロボットを事業化するためには、ゼロから新しく市場そのものを作っていく必要があります。いわゆるゼロイチの事業であり、このような事業に手を出すのは企業経営としてはリスクを考えざるを得ないというわけです。

近接覚センサを使えば、ガラスのように透き通った対象物でも正確に認識して掴める。
写真撮影:リケラボ編集部
── けれどもゼロイチ、だからこそイノベーションになるともいえますね。
小山:そのとおりです。たとえばiPhoneが世界を変えたように、近接覚センサ・ロボットも製造現場を一変させるかもしれません。ただ一般の生活者をユーザーとするiPhoneとは異なり、近接覚センサ・ロボットのユーザーは、あくまでもモノづくりのメーカーであり、それら企業はすでに生産ラインを持っている。そこに新しい従来とは異なるロボットを導入するのは容易ではありません。そこで、まずは現状の産業用ロボットや協働ロボットにも活用できる近接覚センサを開発し、発売することにしました。これだけでも生産現場の効率化に十分に役立ちます。
── それでベンチャーを起業したのですか。
小山:社会実装するためには、自分で事業化するのが早道だと考えたのです。まずは近接覚センサの実用性や可能性を知ってもらう必要があります。そのためにベンチャーでは近接覚センサ単体と、近接覚センサとインテリジェントフィンガーを組み合わせたロボットハンドも開発しています。実用性が評価されたおかげでNEDOの「ディープテック・スタートアップ支援事業」に採用されたほか、ベンチャーキャピタルからの資金調達もできています。
── 近接覚センサが普及していけば、近未来の生産現場は大きく変わりそうですね。
小山:既存の生産ラインでは、以前は人が担っていた作業を産業用ロボットが代替するようになっています。言い換えると、あくまでも前提は人です。この発想を根幹から覆したらどうなるでしょうか。近接覚センサ・ロボットを前提として、それに最適化された生産ラインを立ち上げるのです。人を前提としないのであれば、生産ラインを考えるときの発想の枠が一気に広がるはずです。つまり、近接覚センサ・ロボットを活用すれば、生産現場にパラダイムシフトを起こせるのではないか、と考えています。その際に重要なポイントとなるのが、素人でも簡単に使えるロボットであることです。社会実装を進めるうえでは、誰でもすぐに使えるロボットであるのが重要な条件となります。現在販売中の製品も、ラフなティーチングでの運用が可能のため、SIerや現場作業員の運用作業負担が軽減できるほか、セッティングの切り替えにもそれほど時間を要しません。
家電量販店でロボットを買える未来予想図
── 実用化を進めると同時に、研究も継続していると伺いました。
小山:もちろん研究も進めていて、そのテーマは「人間を超えるロボット」です。人間と同じようなロボットではなく、人間とはまったく異なっていながら、明らかに人間を超える能力を備えたロボットを開発したい。この夢を実現するのがロボット工学の存在意義と考えています。だから、なんとかして人間の五感にはない近接覚を主軸とするロボットを創り出したいのです。
── つまり現状のロボットの延長線上にはないロボットですか。
小山:いわゆる非連続な未来を想像していますが、それは決して簡単ではありません。よくいわれるバックキャスティング、つまり現状の制約条件をすべて取っ払って理想の未来像を考え、たとえば10年後にそれを実現するためには、これからどんなステップを辿っていかなければならないかと考える。現状を前提とすると、どうしても思考の幅が広がりませんから。
透明な試験管を正確に掴むために距離と角度を同時に計測する。
(動画出典:Keisuke Koyama HP)
── たとえば5年後に、どのようなロボットが誕生しているでしょうか。
小山:ロボットが家電の一つとなっていると面白いでしょうね。たとえば家電量販店に行けば、ロボットアームが店頭に並んでいて、手頃な値段で買える。それを家に持って帰ってセッティングすれば、散らかった部屋を勝手に片付けてくれたり、家事をいろいろ手伝ってくれたりする。近接覚センサを使っているから、ロボットアームは極めて正確に、しかも簡単に位置決めできて、対象にソフトに接する。そんなロボットを安価に提供したい。さらに理想をいえば、ロボットが自動的にさまざまな機能を調整できるようにもしたい。たとえば最初はロボットアームは1本で作業しているけれど、2本にしたほうが効率的だと判断すると、もう1本アームを増やす……、少しSFっぽい世界になりますが、そんな未来も視野に入れています。
この研究が世界を変えるかもしれない
── バックキャスティングの話がでましたが、何年ぐらい先の未来を見ているのでしょう。
小山:いま携わっている研究をすべて統合すれば、それこそ「見たこともない」ロボットを創れるのではないか、などと考えています。そのイメージは、まだ頭の中にぼんやりと浮かんでいるだけで、実現するのはたぶん20年ぐらい先ではないでしょうか。だからこそ、研究は面白いともいえるのですが。
── でも機械学習用の画像を独りで黙々と集めているときは、かなりしんどかったのではないですか。
小山:なにか新しいテーマで研究を始めると、最初は問題だらけです。これまで誰も取り組んでいない新しい何かを始めるのだから、それで当然だと思います。けれども、続けていればいずれ細かい問題は解決されていくものです。大切なのは、自分がどちらに目を向けるのか。欠点ばかり気にしていると、こんな研究は続けられないと思ってしまう。近接覚センサも最初はとても壊れやすかったので、その時点で実用化は無理だと思ってしまったら続いていなかったでしょう。けれども、長い目で見て続けていればパラダイムシフトを起こせるのだと、良い部分を見つめていれば続けていけます。5年先、10年先には世界を変える可能性がある、そんな研究に取り組んでいると、毎日ワクワクして楽しくて仕方がないのです。

写真撮影:リケラボ編集部
小山 佳祐(こやま けいすけ)
2015年、電気通信大学大学院情報理工学研究科知能機械工学専攻修士課程修了、2017年、同博士課程短期修了、博士(工学)。同年より東京大学大学院情報理工学系研究科特任助教、2019年、大阪大学大学院基礎工学研究科招聘教員、東京大学大学院情報理工学系研究科客員研究員を経て現職。2022年に株式会社Thinkerを設立、取締役を務める。
※所属や肩書などはすべて掲載当時の情報です。
大学・研究機関の研究開発職なら
Chall-edgeにお任せ!

テンプスタッフの求人サイトジョブチェキに移動します。

リケラボ編集部
理系の学生/社会人の方が、ハッピーなキャリアを描(えが)けるように、色々な情報を収集して発信していきます!
こんな情報が知りたい!この記事についてもっと深く知りたい!といったリクエストがありましたら、お問い合わせボタンからどしどしご連絡ください!
関連記事Recommend
-

動くロボットを食べると、人は何を感じるか? ――可食ロボットとの相互作用を通じ、「生の根源」に迫る:電気通信大学仲田佳弘准教授
-
「島津製作所 バイオものづくり神戸事業所」と「神戸大・先端バイオ工学研究センター」自律実験システムAutonomous Lab見学会レポート
「バイオものづくり」で脱炭素社会を加速させる島津製作所の取り組み
-

ホタテの殻を美しくアップサイクル-ものづくりへの情熱で社会課題を解決-
甲子化学工業株式会社
-

遠距離恋愛の救世主!?4代6年かけて進化を続けてきた「抱き枕ロボ」の研究、いよいよ次の飛躍をめざすステップへ
~金沢工業大学工学部 情報工学科 坂下水彩さん~
-
猛暑も極寒もAIが最適温度を保ってくれる「スマートジャケット」 大阪・関西万博での展示に向けて鋭意開発中!
東阪電子機器株式会社
-
’70年万博の夢再び!? 大阪・関西万博出展「人間洗濯機®」はいよいよ社会実装が可能に!
株式会社サイエンス
-
日本刀の美しさをAIは理解できるか?先端技術で日本刀を設計
金沢工業大学工学部機械工学科精密工学研究室 畝田道雄教授
-

触り心地の計測に新手法!“指の神経情報”を独自のアルゴリズムで数値化!風合い計測のオンリーワン企業、カトーテック
-

空中に浮かぶ映像がタッチパネルになる!現実を拡張する「パリティミラー®」とは?
-

より安全なカーライフを!自動車の安全性能を評価する専門機関に評価試験について色々聞いてみた。